
Abstract
A central question of earthquake science is how far ruptures can jump from one fault to another, because cascading ruptures can increase the shaking of a seismic event. Earthquake science relies on earthquake catalogs and therefore how complex ruptures get documented and cataloged has important implications. Recent investments in geophysical instrumentation allow us to resolve increasingly complex, multi-fault ruptures for even moderate-sized earthquakes. We combine dense seismic and geodetic measurements to reveal an enigmatic rupture in late 2021 at the Mendocino Triple Junction in northern California. We show that rupture was dynamically triggered, yet concurrent, on two distinct faults roughly 30 km apart. Thus, this rupture combines features of complex ruptures usually considered to be single earthquakes, and triggered ruptures considered as multiple earthquakes. This event illustrates that moderate-sized earthquakes can exhibit similar complexity to that more commonly documented for large earthquakes.
Similar content being viewed by others

Introduction
On December 20, 2021, regional and national seismic networks reported an M6.2 earthquake near the Mendocino Fault (MF), a strike-slip fault offshore of Ferndale, California. The MF is a roughly east-west right-lateral strike-slip fault that demarks the boundary between the Gorda Plate to the north and the Pacific Plate to the south. At its eastern terminus, three tectonic plates meet: the Gorda, North America, and Pacific plates. This intersection, known as the Mendocino Triple Junction (MTJ), connects two of the largest and highest-hazard fault systems in North America1; the Cascadia subduction zone to the north and the San Andreas transform fault system to the south. The nature of deformation at the MTJ defies the simplifying assumption of plate tectonic theory that relative motion of the Earth’s crust is accommodated by slip on the boundaries between otherwise rigid, undeforming plates. In fact, the Pacific Plate’s northward motion relative to the Gorda Plate creates substantial internal deformation within the Gorda Plate itself, largely accommodated by offshore strike-slip faulting2. Together these features create a zone of active and complex seismicity.
The tectonic complexity of the region was illustrated by the December 20, 2021, event, first reported by the USGS National Earthquake Information Center (NEIC) as a single moment magnitude (Mw) 6.2 earthquake. However, analysis by the Northern California Seismic Network (NCSN) and the NEIC quickly identified that the waveforms contained two distinct P-wave arrivals, best explained by two separate ruptures: one on the offshore, interplate MF followed ~11 s later by slip ~30 km east on an onshore fault within the subducting Gorda slab (Fig. 1). Routine amplitude-based magnitudes indicated the onshore rupture was larger, and therefore the classically defined “mainshock”, but paradoxically, moment-tensors indicated that the event’s overall style of slip matched the MF orientation. The overlapping seismic waveforms of these two events raised many questions, including (1) how was slip partitioned between these two ruptures, (2) what were the relative orientations of the two faults, and (3) what was the mechanism for triggering rupture on the second fault? With the recent improvements in geophysical monitoring and observations, we can begin to untangle such complex earthquakes.

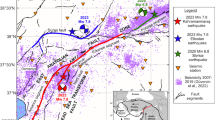
a Relocated seismicity (small circles) showing the two distinct clusters of seismicity in this seismic sequence. The pink star and x show the absolute location and location of the best matching aftershock of the offshore rupture, respectively. The purple star and x show the same for the onshore rupture. In the top left corner, the inferred moment tensors from decomposing the observed Mww combined moment tensor are shown. Relocated seismicity along an east-west cross section is shown below the map. Seismic stations used in relocations are shown as black triangles. The dashed line shows the plate interface between the Gorda and North American Plates34. b Results from Monte Carlo approach to determine two moment tensors whose combination can reproduce the observed Mww, given geometric constraints from earthquake relocations (see “Methods”).
Understanding the orientation of the two faults is challenging because the two ruptures straddle the MTJ, a transform-transform-trench triple junction which results in a complex array of faulting styles (Supplementary Fig. 1). Major earthquakes occur along all three of the plate boundaries at the MTJ. The MTJ is an unstable triple junction3 resulting in internal plate deformation, much of which is accommodated by strike-slip earthquakes within the Gorda Plate, frequently interpreted as left-lateral ruptures on near-vertical, northeast-striking planes2. Aftershock locations of recent major ruptures within the Gorda Plate are poorly located but are broadly consistent with northeast trending lineations (Supplementary Fig. 1). Earthquakes with a variety of strike-slip and thrust geometries are common at the locus of the MTJ.
Results
Resolving potential locations of slip
Although aftershock distributions can be used to infer faulting geometry, this geometry is largely obscured because of uncertainties in routine locations. To address this issue, we applied high-resolution cross-correlation-based earthquake detection and double-difference relocation, using cataloged seismicity as templates (e.g., ref. 4). This refined catalog delineates two main zones of seismicity (Fig. 1). The relocations clearly delineate the offshore MF as an approximately east-west structure striking ~96° for more than 20 km. Although seismicity depths are increasingly poorly constrained with distance offshore, near-shore seismicity is concentrated near 20 km depth. The reported absolute location of the offshore rupture occurs on this structure (Fig. 1a, pink star), indicating initial rupture occurred along the interface of the Gorda Plate and the Pacific Plate (Fig. 1a, pink line). This is consistent with the location of the aftershock with waveforms most highly correlated to the large offshore event (Fig. 1a, pink x).
In contrast with the relative simplicity of the linear offshore seismicity, onshore seismicity exhibits a complex spatial distribution forming an isolated rectangular feature with lateral dimensions of about 5 km (Fig. 1). The most active segment of this feature forms a steeply dipping plane trending toward the northeast with a strike of 56° (Fig. 1a, purple line). This structure coincides with the reported absolute location of the onshore rupture (Fig. 1a, purple star), also proximal to the most correlated aftershock to this earthquake (Fig. 1a, purple x).
Onshore aftershocks are concentrated near 25 km depth, consistent with the onshore subevent depth, and slightly deeper than the offshore seismicity. These depths place onshore seismicity within the mantle of the subducting Gorda slab (intraplate). The rectangular pattern of onshore seismicity plausibly represents a conjugate set of strike-slip faults, with left-lateral slip on northeast-trending faults and right-lateral slip on northwest-trending faults. The orientation of the main lineation is consistent with faulting observed offshore in the Gorda Plate. Northeast–southwest trending strike-slip faults within the Gorda Plate are thought to be reactivated faults formed at a spreading center, accommodating compression within the Gorda Plate2. As relocated seismicity is consistent with these offshore lineations, we interpret the second subevent as reactivating a subducted structure similarly accommodating internal deformation within the Gorda Plate.
A potential third discrete rupture is suggested in seismic waveforms, but is difficult to distinguish because it is buried in the signal of the other more prominent events (Supplementary Fig. 2). This event was detected through cross-correlation with aftershocks. The location of the highest correlating aftershock places the event on the MF, east of the initial rupture (Fig. 1a, teal x). It is unclear from these observations alone if this represents a third discrete rupture, or a continuation of the initial offshore rupture.
The conflicting sizes of the subevents
Although the aftershock hypocenters clearly indicate that the offshore and onshore ruptures were spatially distinct, other geophysical observations provided conflicting indications about how the slip was partitioned between the two events. NEIC body-wave magnitudes of mb 5.3 and mb 5.7 for the offshore and onshore events, respectively (Supplementary Table 1), point to rupture primarily occurring within the subducted Gorda Plate. This is consistent with the onshore event’s larger observed amplitudes for teleseismic body waves, although there are difficulties in precisely decoupling amplitude-based magnitudes for two events so close in space and time.
NEIC estimated a W-phase moment tensor (Mww)5,6 for the combined event with a magnitude of Mw 6.2 and a strike of 114°, similar to the 96° strike of the offshore aftershocks. Due to the low frequencies (<0.02 Hz) of waveforms used to estimate the Mww moment tensor, and the fact that the offshore and onshore ruptures are only separated by about 11 seconds and 30 km, this moment-tensor effectively represents the centroid (the center of the spatiotemporal moment7, estimated as the point source that best fits long-period observations) for both ruptures. Therefore, the nearly east–west strike in the W-phase moment tensor suggests that slip primarily occurred along the MF as opposed to the onshore lineation. This leads to two seemingly incompatible seismological observations: larger amplitudes are observed for the onshore intraplate event at high frequencies, but moment-tensors primarily match the offshore lineation.
Taking the observed lineations in the relocated aftershock sequence, it is possible to linearly combine two sources approximating these geometries to reproduce the W-phase moment tensor and constrain the relative slip partitioning. Allowing for a range of acceptable fault strike, dip, and rake for the two events (Fig. 1b), we find the best fitting orientations of the two faults and determine that the moment resulting from slip along the MF (Mw 6.11) is likely similar to but slightly larger than the moment for the intraplate event (Mw 5.97) to reproduce the observed Mww tensor (Supplementary Table 1).
Near-source static Global Navigation Satellite System (GNSS) surface displacements also allow for interrogation of the relative slip between the two events. Assuming the absolute hypocenters and fault geometries of the two ruptures, we investigate the moment magnitudes and depths required to fit the static displacement observations. In this case, we find optimal fits when the moment is equally partitioned between the two faults at roughly Mw 6.0 (Fig. 2). The best-fitting depths of the two ruptures (14 km and 25 km for the offshore and onshore events, respectively) are consistent with reported hypocenter locations. In some regions (i.e., north of the onshore event), nearly opposite GNSS displacements are produced by slip on each fault, resulting in the combined relatively low amplitude observed static displacements.

a Observed GNSS coseismic offsets (black) and model fits (red) from an optimized model of two earthquake point sources, assuming NEIC epicenter locations with vertical strike-slip faults striking 56° (onshore) and 96° (offshore) (Supplementary Table 1). The individual contributions of the offshore and onshore faults are shown in pink and purple, respectively, and their sum is shown in red. The depth and magnitude of each event were selected by grid search. b Coulomb Failure Stress (CFS) calculation for left-lateral slip produced by the offshore earthquake on the rupture plane of the onshore earthquake. The rupture plane is shown in the profile X–X’. Positive CFS is encouraging slip; negative is discouraging. c Grid search ranges for depth and magnitude of both events with stars showing the best fit.
The when, where, and how of slip partitioning
The seismological observations point to differing kinematic properties on the two faults. The apparent discrepancy can be explained by the rate of slip. By jointly inverting available static GNSS, near-source strong-motion accelerometer, and teleseismic broadband data we estimate the kinematic slip occurring on each fault (Fig. 3). Constraining slip to the fault planes that best reproduce the Mww moment tensor (Fig. 1), the slip inversion prefers moment of Mw 6.14 from slip on the offshore fault and Mw 6.06 on the onshore fault. Along the MF, slip occurred primarily along a 15 km patch over an interval of 20 s, while the intraplate slip occurred over a much shorter time-period (~7 s), requiring a much higher moment rate (Fig. 3c, d). The relatively slower slip on the interplate fault overlaps with the faster slip on the intraplate fault. Along the MF, a small patch of slip occurs east of the main rupture, coincident with the subevent observed in cross-correlations (Fig. 1, teal x). The extent and location of slip on the MF is important because it defines the separation of slip between the two faults. The location of slip, constrained by abundant strong-motion observations, corresponds with the location of active aftershock activity (Supplementary Fig. 3). This supports the ~30 km separation between the primary locations of offshore and onshore slip. If slip on the MF did extend onshore, the separation of the two ruptures would be smaller (~10 km), but the rupture time of the onshore MF slip would likely occur too late to trigger the second event. Our model estimates that it took ~10 s to initiate slip on the MF nearshore subevent east of the main rupture patch (Supplementary Fig. 3), whereas the onshore and offshore ruptures had 11 s difference in origin time.

Finite fault modeling results. a Map of study area with stars denoting the slip initiation locations of both ruptures along the fault planes for each (red line indicates updip edge). Locations of strong-motion accelerometers are given as white triangles, observed static GNSS offsets are shown as black arrows with total model fits in red. Pink and purple arrows denote the model contributions from the offshore and onshore faults, respectively. b Slip on offshore fault and c slip on onshore fault. Stars in b, c indicates the slip initiation point with rupture front contours shown at 2 s intervals. Gray arrows indicate rake direction and are scaled by magnitude of slip. Color bar applies to both b, c. d Moment rate function for the combination of both events (black), with moment rate for offshore earthquake shaded in pink and onshore earthquake shaded in purple. Time axis is relative to the offshore event origin time.
While these observations give insight to where and how slip occurred on these two structures, a fundamental question remains as to how the second event was triggered. S-wave arrivals from the off-shore rupture are predicted to arrive at the intraplate fault seconds before slip begins onshore. Coulomb stress modeling shows that static stress transfer from the initial offshore slip discourages failure on the onshore fault (Fig. 2b). Peak ground velocities measured near the onshore fault exceed 10 cm/s, above levels that have previously been documented to allow for dynamically triggered seismicity8. These observations strongly suggest dynamic stresses from passing seismic waves, as opposed to static stress changes, triggered rupture on the onshore fault.
Discussion
The observations that rupture leaped up to 30 km between two faults, with simultaneous slip on both faults, has a fundamental effect on our understanding of how to model earthquake hazard. This is especially true given these were moderate sized events, which are sometimes expected to have simpler rupture characteristics. It is well documented that earthquake ruptures can interact on a variety of spatial scales. Over short distances, static and dynamic stress transfers typically allow strike-slip earthquake rupture to step over discontinuities of about 5 km or less, allowing slip on multiple fault segments9, and therefore rupture forecast models may allow for similar distances in fault connectivity assumptions10. Earthquake ruptures can also be triggered at very great distances, where the dynamic stresses induced from passing seismic waves can trigger earthquakes thousands of km from the source11. At intermediate distances, the relative importance of static versus dynamic stresses is still unclear, yet evidence for the importance of near-to-intermediate distance dynamic triggering has been mounting in recent years12,13. Nissen et al.12 made the important observation that for large-magnitude events, cascading ruptures on multiple faults are possible over large distances (~50 km). This Mendocino rupture sequence shows that this behavior extends to moderate-magnitude events. Only high-density geophysical observations allow us to see this behavior for earthquakes of this size.
Complex, multi-fault, rupture is a long observed phenomenon14, and complex large magnitude events (M7+) are becoming identified more regularly, though this is less commonly interpreted for moderate-sized events. Prominent examples include the 1992 M 7.3 Landers, California earthquake15 and the 2012 M 8.6 Indian Ocean earthquake16 among many others. Such ruptures may be a consequence of combined static and dynamic stress triggering, activating a collection of faults that may be nearly critically stressed. An extreme example is the M 7.8 Kaikoura, New Zealand earthquake where rupture occurred on at least 21 faults for over a minute17. That type of rupture is treated as a single, albeit complex, earthquake. But where exactly do we draw the line between triggered (multiple earthquakes) and complex (one earthquake) ruptures?
The 2021 Mendocino rupture sequence combines the features of triggered (two earthquakes) and complex (one earthquake) ruptures, making it challenging to classify. The fact that the offshore rupture overlapped in time with the onshore rupture points to single complex event, suggesting that even moderate (M6) earthquakes can leap 30 km between faults. But the fault structures were distinct and slip likely resulted from dynamic triggering from the first rupture, which is characteristic of remotely triggered events. From this example, we can conclude that the basic concept of “an earthquake” is poorly defined. Had the first rupture terminated before the second rupture initiated, we would likely classify this as two separate earthquakes; really, the distinction is arbitrary. Neither the duration of slip on the first (offshore) fault nor the distance (and thus the time delay) to the second fault controls the fundamental nature of the interaction between slip on these faults.
When looking at the impact of the events, the overlapping shaking they produce lends these to being classified as a single ‘event’. A more traditional approach would be to suggest that the rupture patches are spatially distinct, and therefore these are two distinct earthquakes no matter their relationship. Yet, the way we classify and catalog complex earthquakes has implications for both hazard modeling and fundamental studies of earthquake physics. Earthquake catalogs, which underpin both endeavors, rely on the premise that we can define a single earthquake. What was once considered a single earthquake, perhaps due to observational limitations, may now be resolvable as multiple distinct ruptures. For this reason, as time passes, we may continue to document more and more earthquakes, even of moderate magnitude, that seismologists deem as “complex.” At present, we do not know how common these ‘complex’ ruptures of moderate earthquakes are, because we do not often have the near-source geophysical observations necessary to fully explore the complexities of an event. As example of how uncommon local observations are, when looking at the NEIC’s earthquake catalog18, only ~4% of M5.5 events have at least 5 arrival-time observations within 1 degree, let alone strong-motion and GNSS observations.
Ultimately, the Mendocino rupture characteristics point to the inescapable conclusion that geophysical observational and modeling capabilities allow the characterization of complexity previously not possible. Consequently, we need to reconsider how complex and triggered earthquake ruptures are characterized, cataloged, and incorporated in seismic hazard analyses in the future.
Methods
Moment tensor decomposition
The W-phase moment tensor for the combined source was modeled using USGS NEIC’s standard processing procedures as outlined by Hayes et al.6. A Monte Carlo approach was used to estimate the combination of two sources that could form the total moment of the W-phase solution. Based on the observed lineation of relocated seismicity, the offshore fault was allowed to strike 96°± 7.5°, dip 90°−75°, and have a rake of −180° ± 30°. The onshore fault was allowed to strike 56°± 7.5°, dip 90°−75°, and have a rake of 0° ± 30°. To perform the Monte-Carlo analysis, we first randomly selected a moment magnitude for the onshore event between Mw 5.7 and 6.2, calculating the moment for the offshore event so that the sum of the moment for the two events totaled that observed by the W-phase solution. We then randomly selected fault orientations for both events, and accepted solutions where the combination of the two moment-tensors had a Kagan angle within 15° of the observed W-phase solution. The Monte-Carlo was run for 100,000 iterations, and the average of the strike, dip, rake, and moments for the accepted solutions of the onshore and offshore events were calculated. We rely on the PyRocko python package19 to convert between strike, dip, and rake and tensors as well as to compute Kagan angles.
Geodetic modeling/stress modeling
GNSS time series were processed using the GipsyX software20. The offsets, seasonal trends, and any deformation from postseismic deformation were estimated using the est_noise code21. We modeled the GNSS offsets and Coulomb Failure Stress (CFS) using the homogeneous elastic half-space formulation of Okada22 with shear modulus and Lamé parameter equal to 32 GPa. For CFS, the receiver fault plane was assumed to slip in a purely left-lateral sense (0° rake). We assumed a coefficient of friction of 0.4. For determining the optimal depth and magnitude of the two point-sources, we performed a 4-dimensional grid search through depth and magnitude for each event. We stepped through magnitudes with a grid spacing of 0.1 magnitude units, and depth with a grid spacing of 2 km. We then minimized the L2 misfit to the east and north components of the GNSS offsets. The best-fitting parameters were 14 and 25 km depth for the offshore and onshore events respectively, and Mw 6.0 for each event.
Slip modeling
We used the Wavelet and simulated Annealing SliP inversion (WASP)23 code to perform the joint inversion using broadband teleseismic waveforms (7 P-waves, 9 SH-waves, and 11 long-period surface waves), in addition to 15 strong-motion accelerometer and 54 static GNSS observations. The inversion uses a one-dimensional local velocity model based on Castillo & Ellsworth24, layered on top of the Preliminary Reference Earth Model25. We consider two planar faults with the orientations from the moment tensor analysis and aftershock relocations (Fig. 1). Rakes were allowed to vary +/−15 degrees of average rake for each rupture. Due to the proximity of the two earthquakes in space and time, the earthquakes are inverted simultaneously, such that slip on the two faults is summed to calculate the synthetic waveform and static fits. Slip on the onshore fault is delayed 11 s from the origin time of the offshore fault, in accordance with the origin time from the Advanced National Seismic System (ANSS) comprehensive catalog26.
Aftershock detection and relocation
We used routinely cataloged earthquakes in this sequence as waveform templates to detect small events missing from the catalog, following the methodology presented by Shelly et al.4. For waveform templates, we selected events within 50 km of 40.3° latitude, −124.5° longitude, resulting in 202 events from 20 December 2021 through 10 January 2022. We used available seismic stations within 150 km, including all available velocity components. We also used acceleration channels for stations lacking three-component velocity. We used phase arrival time determinations from the Northern California Seismic Network (NCSN) to window templates. Template durations were 2.5 and 4.0 seconds for P and S, respectively, starting 0.3 seconds prior to the phase arrival time. If no S-wave arrival time was listed in the catalog, the arrival time was estimated based on the catalog origin time and P-wave arrival time, assuming a Vp/Vs ratio of 1.73. All data were filtered 2–10 Hz.
Each template was scanned through the day-long records of continuous seismic data. As in Shelly et al.4, an initial detection was declared when the summed correlation across the network exceeded 8 times the median absolute deviation (MAD) for the day. Then, we searched for correlation peaks (positive or negative) on individual seismic components within a short time window (0.5 s for P; 0.865 s for S) of the summed correlation peak, retaining those that exceeded 7 times the daily MAD. The precise timing of these peaks was estimated using a quadratic interpolation of the correlation values, which was saved to use as input for double-difference relocation. We used hypoDD27 to precisely relocate events, using correlation-derived differential times (as described above) combined with differential times derived from catalog phase picks, using the velocity model of Castillo & Ellsworth24. To constrain the larger-scale earthquake location patterns, catalog data were initially weighted most heavily; correlation data were allowed to dominate the later iterations to resolve fine-scale location structure. We considered events retaining at least 10 correlation-derived differential times for each of P and S to be well located, resulting in 1043 relocated events during the 22-day analysis period, approximately 5 times the number included in the routine NCSN catalog for the same period.
Data availability
Waveform and phase data were obtained from the Northern California Earthquake Data Center (NCEDC), https://ncedc.org (last accessed 12 May 2022). Earthquake Parametric Data and Peak Ground Velocity measurements from NCSN and NEIC are available at https://earthquake.usgs.gov (last accessed 12 May 2022). The associated relocated earthquake catalog, and data to reproduce the finite fault model are available at https://www.sciencebase.gov/catalog/item/636a7ebbd34ed907bf6a6904 and https://doi.org/10.5066/P9DO81VL28. Digital elevation models used in maps from Tozer et al.29 and Farr and Kobrick30.
Code availability
The tools used to perform these analysis include the Wavelet and simulated Annealing SliP inversion (WASP)23 (https://github.com/slipinversion/WASP, last accessed Feb 21, 2022), HypoDD27 for relative earthquake relocations (https://www.ldeo.columbia.edu/~felixw/hypoDD.html, last accessed Feb 21, 2022), and the python packages pyrocko19 and obspy31. Figures were created using the matplotlib32 python package and Generic Mapping Tools33.
References
Petersen, M. D. et al. The 2018 update of the US National Seismic Hazard Model: overview of model and implications. Earthq. Spectra 36, 5–41 (2020).
Gulick, S. P., Meltzer, A. S., Henstock, T. J. & Levander, A. Internal deformation of the southern Gorda plate: fragmentation of a weak plate near the Mendocino triple junction. Geology 29, 691–694 (2001).
McKenzie, D. P. & Morgan, W. J. Evolution of triple junctions. Nature 224, 125–133 (1969).
Shelly, D. R., Ellsworth, W. L. & Hill, D. P. Fluid-faulting evolution in high definition: connecting fault structure and frequency-magnitude variations during the 2014 Long Valley Caldera, California, earthquake swarm. J. Geophys. Res. Solid Earth 121, 1776–1795 (2016).
Duputel, Z., Rivera, L., Kanamori, H. & Hayes, G. W-phase source inversion for moderate to large earthquakes (1990–2010). Geophys. J. Int. 189, 1125–1147 (2012).
Hayes, G. P., Rivera, L. & Kanamori, H. Source inversion of the W-Phase: real-time implementation and extension to low magnitudes. Seismol. Res. Lett. 80, 817–822 (2009).
Ekström, G. In Treatise on Geophysics (Second Edition) (ed. Schubert, G.) 467–475 (Elsevier, 2015).
Gomberg, J. & Johnson, P. Dynamic triggering of earthquakes. Nature 437, 830–830 (2005).
Biasi, G. P. & Wesnousky, S. G. Steps and gaps in ground ruptures: empirical bounds on rupture propagation. Bull. Seismol. Soc. Am. 106, 1110–1124 (2016).
Field, E. H. et al. Uniform California earthquake rupture forecast, version 3 (UCERF3)—the time-independent model. Bull. Seismol. Soc. Am. 104, 1122–1180 (2014).
Hill, D. P. et al. Seismicity remotely triggered by the magnitude 7.3 Landers, California, earthquake. Science 260, 1617–1623 (1993).
Nissen, E. et al. Limitations of rupture forecasting exposed by instantaneously triggered earthquake doublet. Nat. Geosci. 9, 330–336 (2016).
Fan, W. & Shearer, P. M. Local near instantaneously dynamically triggered aftershocks of large earthquakes. Science 353, 1133–1136 (2016).
Mitsuhiro, M. Inversion of geodetic data. II. Optimal model of conjugate fault system for the 1927 Tango earthquake. J. Phys. Earth 25, 233–255 (1977).
Sieh, K. et al. Near-field investigations of the Landers earthquake sequence, April to July 1992. Science 260, 171–176 (1993).
Yue, H., Lay, T. & Koper, K. D. En échelon and orthogonal fault ruptures of the 11 April 2012 great intraplate earthquakes. Nature 490, 245–249 (2012).
Xu, W. et al. Transpressional rupture cascade of the 2016 Mw 7.8 Kaikoura earthquake, New Zealand. J. Geophys. Res. Solid Earth 123, 2396–2409 (2018).
U.S. Geological Survey. The Preliminary Determination of Epicenters (PDE) Bulletin. https://doi.org/10.5066/F74T6GJC (2017).
Heimann, S. et al. Pyrocko - an open-source seismology toolbox and library. 34794 Bytes, 4 files. https://doi.org/10.5880/GFZ.2.1.2017.001 (2017).
Bertiger, W. et al. GipsyX/RTGx, a new tool set for space geodetic operations and research. Adv. Space Res. 66, 469–489 (2020).
Langbein, J. Improved efficiency of maximum likelihood analysis of time series with temporally correlated errors. J. Geod. 91, 985–994 (2017).
Okada, Y. Internal deformation due to shear and tensile faults in a half-space. Bull. Seismol. Soc. Am. 82, 1018–1040 (1992).
Goldberg, D. E., Koch, P., Melgar, D., Riquelme, S. & Yeck, W. L. Beyond the teleseism: introducing regional seismic and geodetic data into routine USGS finite‐fault modeling. Seismol. Res. Lett. 93, 3308–3323 (2022).
Castillo, D. A. & Ellsworth, W. L. Seismotectonics of the San Andreas Fault System between Point Arena and Cape Mendocino in northern California: implications for the development and evolution of a young transform. J. Geophys. Res. Solid Earth 98, 6543–6560 (1993).
Dziewonski, A. M. & Anderson, D. L. Preliminary reference Earth model. Phys. Earth Planet. Inter. 25, 297–356 (1981).
U.S. Geological Survey. Advanced National Seismic System (ANSS) comprehensive catalog. https://doi.org/10.5066/F7MS3QZH (2017).
Waldhauser, F. & Ellsworth, W. L. A double-difference earthquake location algorithm: Method and application to the northern Hayward fault, California. Bulletin of the seismological society of America 90, 1353–1368 (2000).
Yeck, W. L., Goldberg, D. E., Shelly, D. R., Earle, P. S. & Materna, K. Z. Supporting data, catalog, and models for characterizing 2021 Pertrolia, CA, earthquake sequence. https://doi.org/10.5066/P9DO81VL (2022).
Tozer, B. et al. Global bathymetry and topography at 15 Arc Sec: SRTM15+. Earth Space Sci. 6, 1847–1864 (2019).
Farr, T. G. & Kobrick, M. Shuttle radar topography mission produces a wealth of data. Eos Trans. Am. Geophys. Union 81, 583–585 (2000).
Beyreuther, M. et al. ObsPy: a Python toolbox for seismology. Seismol. Res. Lett. 81, 530–533 (2010).
Hunter, J. D. Matplotlib: a 2D graphics environment. Comput. Sci. Eng. 9, 90–95 (2007).
Wessel, P. et al. The Generic Mapping Tools Version 6. Geochem. Geophys. Geosyst. 20, 5556–5564 (2019).
Hayes, G. P. et al. Slab2, a comprehensive subduction zone geometry model. Science 362, 58–61 (2018).
Acknowledgements
We are grateful to Jerry Svarc for providing the static GNSS offsets. Stations used in this study are operated by the U.S. Geological Survey, UC Berkeley, and the California Division of Mines and Geology. Thank you to the many seismic analysts and system administrators who rapidly report seismic observations and make data freely available. Thank you to Thomas Heaton, John Vidale, Ryan Gold, Ben Brooks, and Jeffrey McGuire for their helpful reviews. Any use of trade, firm, or product names is for descriptive purposes only and does not imply endorsement by the U.S. Government. Funding was provided by the U.S. Geological Survey. No research grants were used in this study.
Author information
Authors and Affiliations
Contributions
The authors contributed equally to the final manuscript. W.L.Y. performed the moment-tensor analysis and decomposition. D.R.S. performed the event detections and relocations. K.Z.M. performed the static geodetic analysis. D.E.G. performed the finite-fault modeling. P.S.E. led the initial response to the event at the NEIC. All authors contributed to writing the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Peer review
Peer review information
Communications Earth & Environment thanks John Vidale and Thomas Heaton for their contribution to the peer review of this work. Primary handling editors: Sylvain Barbot, Joe Aslin. Peer reviewer reports are available.
Additional information
Publisher’s note Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary information
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons license, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons license and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this license, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Yeck, W.L., Shelly, D.R., Materna, K.Z. et al. Dense geophysical observations reveal a triggered, concurrent multi-fault rupture at the Mendocino Triple Junction. Commun Earth Environ 4, 94 (2023). https://doi.org/10.1038/s43247-023-00752-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s43247-023-00752-2
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
