
Abstract
The Jovian moon Io hosts the most powerful persistently active volcano in the Solar System, Loki Patera1,2. The interior of this volcanic, caldera-like feature is composed of a warm, dark floor covering 21,500 square kilometres3 surrounding a much cooler central ‘island’4. The temperature gradient seen across areas of the patera indicates a systematic resurfacing process4,5,6,7,8,9, which has been seen to occur typically every one to three years since the 1980s5,10. Analysis of past data has indicated that the resurfacing progressed around the patera in an anti-clockwise direction at a rate of one to two kilometres per day, and that it is caused either by episodic eruptions that emplace voluminous lava flows or by a cyclically overturning lava lake contained within the patera5,8,9,11. However, spacecraft and telescope observations have been unable to map the emission from the entire patera floor at sufficient spatial resolution to establish the physical processes at play. Here we report temperature and lava cooling age maps of the entire patera floor at a spatial sampling of about two kilometres, derived from ground-based interferometric imaging of thermal emission from Loki Patera obtained on 8 March 2015 ut as the limb of Europa occulted Io. Our results indicate that Loki Patera is resurfaced by a multi-phase process in which two waves propagate and converge around the central island. The different velocities and start times of the waves indicate a non-uniformity in the lava gas content and/or crust bulk density across the patera.
Similar content being viewed by others


Main
We observed Io with the Large Binocular Telescope (LBT) during a mutual occultation event on 8 March 2015 ut in which Europa passed in front of Io (Fig. 1). During the event, images were obtained with the LMIRcam camera at a wavelength of 4.8 μm, using the LBT Interferometer (LBTI) and adaptive optics12,13,14. The sampling cadence of 120 ms corresponds to a 2-km advance of Europa’s limb across Loki Patera between successive exposures. Although satellite occultations have been used for decades to study Io15, advanced adaptive optics technology and dual-telescope interferometric imaging provide unprecedented sensitivity for individual, identifiable hotspots on Io, permitting high cadence sampling and thus high spatial resolution mapping. From the images, we extract a high-time-resolution occultation light curve (Fig. 2) which we use to derive temperature and lava-age maps of Loki Patera (Fig. 3; see Methods). Although the calibrated 1σ uncertainty in the total flux density corresponds to only 1 K in temperature, many factors influence the conversion of flux density to temperature, including assumptions about the pixel filling factor and lava emissivity. Noise in the light curve, which is correlated on subsecond timescales, also introduces some uncertainty into the reconstructions. As discussed in Methods, the maps shown in Fig. 3 are optimized to match the observations without over-fitting these artefacts. In addition, the temperature distribution at small (a few kilometres) spatial scales cannot be uniquely recovered, and structure in the maps at these scales can be viewed as a representative model that provides a good fit to the data and is consistent with the robust large-scale gradient.

Time sequence of images taken before, during and after the occultation of Loki Patera by Europa, as well as an image after Europa had fully cleared Io’s disk. These are four of the approximately 3,000 4.8-μm images obtained on 2015 March 08 ut with LBTI. Water ice on Europa’s surface absorbs incident sunlight, while Io’s surface is more reflective at this wavelength. The thermal emission from Loki Patera and Pillan Patera stands out prominently against Io’s disk. The fringe pattern of their emission is a product of interferometric imaging, which combines light from the two LBT telescopes.

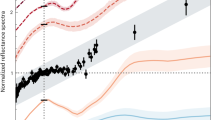
Main panel, the occultation light curve with 1σ uncertainties (data points with error bars), normalized to the out-of-occultation intensity of Loki Patera (see Methods). The four panels at the top of the figure indicate the position of Europa (shown as a circular shadow) relative to Loki Patera at different times (arrowed) during the occultation. The vertical dashed lines separate the occultation data points that are used in the modelling from the baseline data. The pre-ingress and post-egress points are used to determine the baseline noise distribution. Time T = 0 s represents the start of the occultation data used in the modelling.

a, b, Temperature (a) and age (b) maps of Loki Patera derived from the occultation light curve shown in Fig. 2. The outline of the patera and the cool central island are fixed on the basis of spacecraft imaging data19, and the intensity distribution is determined by fitting a model to the occultation light curve. Locations 1 and 2 on a indicate the approximate regions where the two resurfacing waves originated; both waves progressed eastward around the island and converged at Location 3. The maps assume an emissivity of 1 and a basaltic lava composition. The striping effect is an artefact produced by correlated noise in the light curve (see Methods for details).
Existing models for cooling silicate lavas1 relate the temperature map to a solidified lava surface age map (Fig. 3). The age map reveals the presence of two resurfacing waves: one starting in the northwest corner (Location 1 in Fig. 3) about 250 days before the date of our observations and moving at a rate of 1 km d−1 in the clockwise direction, and a second wave starting in the west (Location 2 in Fig. 3) approximately 180 days before our observations and proceeding at 2 km d−1 in the anti-clockwise direction (see Fig. 4). These rates reflect the average temperature gradient across each region of the patera; the resurfacing rate may also vary locally. The waves converged in the southeast of the patera (Location 3 in Fig. 3) and began to solidify approximately 75 days before our observations. The specific distribution of lava ages across the patera encodes information about the resurfacing process.

Model temperature maps (a–d) and the corresponding patera surface age plots (f–i) for different stages of the dual-wave progression, assuming a smooth, continuous resurfacing. ΔT is the time since the resurfacing initiated, and the base temperature map models the temperature of the cooling crust following the previous resurfacing, assumed to begin 450 days prior to the start of the resurfacing shown here. Ages are plotted as a function of distance anti-clockwise around the patera from the narrow, northwest corner. The last row (e, j) shows the corresponding properties retrieved from the data, which indicate resurfacing rates of 1 km d−1and 2 km d−1 for the northern and southern parts of the patera, respectively.
The temperature and age maps reveal a multi-phase resurfacing process within the patera, and show that the resurfacing mechanism is considerably more complex than previously modelled. The presence of a large-scale temperature gradient indicates a coherent process acting across the entire 200-km-wide feature. High-resolution Galileo spacecraft observations imaged a smooth temperature gradient across part of the patera4,6,7,9. Although the occultation technique cannot recover temperature structure at the small spatial scales probed by Galileo, the LBT data reveal that this is not a local effect; the presence of a temperature gradient that is coherent across large areas of the patera is a fundamental feature of the resurfacing process of the entire Loki Patera.
Time-series data from the Keck and Gemini N telescopes place the LBT data in the context of Loki Patera’s episodic activity since 201316. The LBT observations were obtained 6–8 months after the start of the preceding brightening event (July/August 2014), and 2–3 months after its conclusion (December 2014)16. The lava surface age map (Fig. 3) demonstrates that the majority of the patera floor is younger than 200 days, which matches the date this brightening began and confirms that the entire patera was resurfaced during the most recent event. In addition, the age of the youngest lava surface (approximately 75 days old) is consistent with the end date of the most recent brightening episode, demonstrating that no localized activity has taken place since the end of the last event.
The two resurfacing waves began in the west margin at different dates (ΔT = 50–100 days) and moved around the central island until they converged in the southeast corner (Figs 3 and 4). Although the data do not allow a definitive identification of the resurfacing mechanism, the presence of a multi-phase process involving a ‘double wave’ has implications for both the lava flow and the foundering lava lake crust models.
If Loki Patera is being resurfaced by lava flows, the episodic magma supply must consist of two steady pulses of magma reaching the surface at nearby yet distinct times and locations. The difference in areal resurfacing rate between the northern and southern parts of the patera also requires differences in magma properties or discharge rates between these locations. Although different flow rates could also be caused by local topography, the flatness of the patera floor as seen by Galileo17 disfavours this explanation. The resurfacing rate for the southern part of the patera is twice the rate observed in 2001 Galileo Near-Infrared Mapping Spectrometer (NIMS) data in the same part of the patera (about 1 km d−1)8,9, suggesting that the differences are due to variable lava properties rather than fixed localized effects.
In the lava lake foundering crust scenario5,9,18, the resurfacing rate is diagnostic of the bulk density structure of the crust. The presence of two resurfacing waves moving at different rates implies independent sources of magma along the western edge of the lake, with a higher bulk density in the southern magma source to explain the faster resurfacing. This density difference indicates either a difference in magma composition or, more likely, a difference in the amount of gas in the magma, which forms voids in the crust as it solidifies and decreases the crust bulk density5,18. A higher crust bulk density causes the crust to sink sooner after solidification, while a lower lava porosity slows the cooling of the crust, decreasing the rate of progression of the foundering wave.
The presence of the cool ‘island’ in the middle of Loki Patera (Fig. 3) is required to fit the data (see Methods). We confirm that the cool island was still present on 8 March 2015, and is therefore a long-term fixture of the patera, persisting for at least the 36 years since it was first seen during the Voyager 1 encounter in March 1979. The island has withstood the physical and thermal stresses imposed by the eruption of thousands of cubic kilometres of lava adjacent to it, indicating that it is an anchored feature rising up through the surrounding lava, rather than a large raft on a sea of magma.
Temperature maps of portions of the patera have been previously derived from high-resolution Galileo NIMS observations obtained in 1999 and 20012,4,8,9. Although the intrinsic variability of Loki Patera limits the value of direct comparison between observations obtained years apart, the propagation rate of the resurfacing wave derived from our age map is consistent with the rates of 1–2 km d−1 derived from both these NIMS data and Galileo Photo Polarimeter-Radiometer (PPR) observations5,6,7, as well as earlier Voyager data5. In addition, the anti-clockwise progression of the wave in the southern part of the patera matches the direction derived from the Voyager and Galileo observations5,8,9. These results were seemingly contradicted by time-series adaptive optics data from the Keck and Gemini N telescopes16, which suggest a clockwise resurfacing direction along the east side of the patera. The discovery of two resurfacing waves, one of which moves clockwise in the north, and the other anti-clockwise in the south, can reconcile these apparently contradictory results. Although the details of the resurfacing may vary between each brightening cycle, all past observations of Loki Patera are consistent with the overturn progression described here, in combination with sporadic activity at the southwest margin.
Methods
Observations
We observed the occultation of Io by Europa on 2015 March 8 ut using Fizeau interferometric imaging with the Large Binocular Telescope Interferometer (LBTI)13,20 and the LMIRcam near-infrared instrument14,21, which has a plate scale of 0.0107″ per pixel22 (see Fig. 1). Both telescopes were adaptive-optics (AO) corrected using Io as a natural guide star at R band for wavefront correction. During the occultation event, Europa entered the wavefront sensors’ fields of view and contributed to the AO correction. Observations were acquired at M band (4.6–5.0 μm), which is ideally suited to image the thermal emission from volcanic structures on the surface of Io. Europa’s occultation of Loki Patera began at 6:16:23 ut and completed about 150 s later. Integration times were set to 15.4 ms per exposure, with an average of 120 ms between each exposure start. Data were acquired in subframe mode (512 × 512 pixels) to decrease camera overheads and maximize the imaging cadence. The details of the observations are given in Extended Data Table 1.
Fizeau observations with LBTI coherently combine the light from the LBT’s two AO-corrected12 8.4-m mirrors to produce a characteristic interference pattern along the direction of the two-telescope baseline13. These types of observations result in an increased spatial resolution across the diffraction fringes while also concentrating more of the light into the central core of the point spread function (PSF).
For this sequence of observations, and all Io observations with LBTI, the fringe sensor cannot operate because Io is completely resolved and Loki Patera is too faint in the near-infrared to serve as a point source for automated phase stabilization. The interference pattern therefore drifts around a central (white-light) fringe due to small changes in the path-length difference between the two telescopes caused by instrumental vibrations and atmospheric disturbance. Throughout the observations, phase stabilization was performed manually through tracking of the M-band fringes23.
Although the LBT’s Fizeau mode of operation delivers the ultimate diffraction-limited performance of the 22.8-m effective diameter of the LBT, that resolution (30 mas diffraction limit at 4.8 μm) only corresponds to a 100-km spatial resolution at Io23, much lower than the 2 km frame to frame limb motion of Europa in the time-resolved occultation profiles. The primary advantage of the use of AO and Fizeau interferometry for the observation reported here is in resolving the individual volcanic sources on Io’s approximately 1.0″ diameter disk and maximizing the signal-to-noise ratio for each source by minimizing the angular size of the PSF and thus the local thermal background contributing to the noise.
Europa’s gradual occultation of Io’s surface systematically blocks flux from volcanic hotspots at each time step, providing spatial information along the direction of motion of Europa’s edge. With a limb motion of about 5.5 mas s−1 (20 km s−1) relative to Io’s disk, the 120 ms observing cadence corresponds to a spatial sampling resolution of 2.4 km. Owing to the noise on individual data points, the effective spatial resolution is a factor of a few lower than this.
Mutual occultation events between the Galilean satellites occur for periods of several months every six years. During each such period, there can be more than 100 occultations of Io by one of the other satellites. While not all are optimal for the LBTI techniques discussed here, nor observable from a given terrestrial hemisphere, the quantity of such events provides many opportunities for performing similar observations in the future. The experimental approach is also applicable to observations made with high-Strehl AO systems on any large (8–10-m) near-infrared telescope, provided the AO system and camera are suitable.
Data reduction
Standard LMIRcam image reduction was performed, which consists of linearity correction, sky background subtraction, reference pixel correction, bad pixel removal, and distortion correction. Flat-fielding was not performed because the pixel response is intrinsically flat across LMIRcam’s entire detector and the region of interest is small (1″ × 1″) compared to the instrument’s full field of view (20″ × 20″). The final reduced images show excellent uniformity (<1% deviation) across the observed field. A series of background observations were acquired before and after the occultation with Io nodded to a separate detector position. For each Io science frame, the 500 background frames closest in time were median-combined and subtracted from the science frame. The process of removing the sky background also subtracts the detector bias and any dark current contributions.
Background removal
Individual images from the occultation event show Io as a bright disk covered with volcanic hot spots being occulted by a dark Europa (see Fig. 1). Reflected sunlight makes the disk of Io visible, while strong water ice absorption causes Europa to reflect much less sunlight than Io. Precise aperture photometry of Io’s volcanoes requires a uniform background and thus modelling and removal of the ‘crescent’ of the bright disk of Io. Gaussian convolution of a multi-parameter model with the telescope PSF produces synthetic, volcano-free images for frame-by-frame subtraction from the data. The model parameters include the disk flux, the radii of Io and Europa, the angular offset between the centres of the bodies, and limb darkening. The final synthetic image is produced by optimizing these model parameters via a gradient descent algorithm. Prior to aperture photometry, the model is directly subtracted from the background-corrected data on a frame by frame basis, yielding a sequence of images consisting of only the hot spots. An example image is shown in Extended Data Fig. 1 before and after this correction is applied.
Frame registration and alignment
The background-subtracted images are rotated to position Io’s polar axis in the horizontal direction. The relative positions of both Loki Patera and Pillan Patera are then tracked frame-to-frame using a combination of Gaussian centring and cross-correlation with respect to a median-combined reference PSF. Monitoring of Pillan Patera’s position provides an extra check on the location of Loki Patera, particularly during Europa’s ingress. This method enables sub-pixel frame registration.
Light curve extraction
Aperture photometry provides the flux measurements contributing to the observed light curve (Fig. 2). A circular aperture with a 13-pixel (about 140 mas) radius optimized the signal-to-noise ratio, and was used for the photometry. This corresponds to the approximate full-width at half-maximum of a single-aperture PSF (1.2λ/D). Owing to the lack of closed-loop phase stabilization, the fringed PSF oscillates around a central fringe, but generally stays contained within a region corresponding to the central core of a single-aperture Airy pattern14. An aperture size similar to that of the central core (especially after frame registration) therefore collects the vast majority of the source flux even if the phasing is imperfectly aligned. The 13-pixel aperture radius corresponds to a full aperture width of about 1,000 km on Io’s surface, or five times the physical width of Loki Patera. The images shown in Fig. 1 demonstrate that Loki Patera is the only bright hotspot located within the extraction aperture. If small nearby hotspots were present within the aperture but indistinguishable from Loki Patera in the images, the occultation of these hotspots would be present in the light curve of Loki Patera at a time offset from that of the main ingress and egress. Since no additional dip in intensity is seen in the light curve (see Fig. 2), the presence of other hot spots within the extraction aperture with flux density above the noise (approximately 2% of Loki Patera’s intensity) can be ruled out.
The flux density of the spatially distinct Pillan Patera hotspot (see Fig. 1) is simultaneously extracted to monitor any fluctuations during Europa’s transit. Because changes in atmospheric transmission or AO performance would affect the flux from both volcanoes similarly, Pillan Patera could function as a baseline to correct those fluctuations in Loki Patera’s light curve that would otherwise be indistinguishable from occultation effects. The baseline measurements of both Pillan Patera and Loki Patera show low-order variations of about 2% over tens of seconds, indicating good stability. We opted to exclude these corrections because of the negligible impact on the final light curve relative to the measurement uncertainties. Flux uncertainties are derived for each frame by measuring the pixel-to-pixel variations in the sky annulus. The uncertainty measurements closely match the standard deviation of baseline sections of the Loki Patera and Pillan Patera light curves.
Flux calibration
The absolute unocculted intensity of Loki Patera is derived by calibrating to the standard star HD 81192, which was observed 1.5 h after the occultation of Loki Patera. The reference star observations were performed in similar conditions as the Io observations (1.1 airmasses, 1″ seeing, and 6 mm of precipitable water vapour). We assume that atmospheric transparency and AO performance stayed constant based on the consistent, stable weather conditions and the fact that observations of both Io and HD 81192 showed very little variations in the measured counts. For a given extraction aperture, the total counts for Loki Patera were measured relative to that of HD 81192. We used a variety of aperture sizes in order to determine if the extended nature of Loki Patera produced any significant flux loss. Count ratios were consistent for apertures with radii greater than 10 pixels, and gave an intensity ratio of 3.660 ± 0.035 between HD 81192 and Loki Patera. Using the Python code Pysynphot24, a Phoenix model template for a G7III type star was normalized to the 2MASS and WISE measurements of HD 81192. The throughput curve of LMIRcam’s M-band filter transmission was then convolved with the normalized template to determine the apparent magnitude of HD 81192 as seen at the M-band. We calculate the total flux density of Loki Patera to be 0.950 ± 0.025 Jy. The uncertainties include propagated errors from the flux ratios, normalization uncertainties based on the 2MASS and WISE error bars, and possible mismatches to the spectral template.
Light curve modelling
The change in the integrated brightness of Loki Patera at each timestep during ingress and egress represents the amount of emission coming from the strip of the patera that is covered or un-covered during that time interval. The occultation light curve can therefore be used to re-construct the distribution of emission from the patera floor. The difference in orientation between the directions of motion of Europa’s limb across Loki Patera during ingress and egress permits a reconstruction of the full two-dimensional thermal emission map. We reconstruct this map by creating model emission maps, generating the model light curves, and fitting these light curves to the observations. The direct product of the modelling process is a map of the 4.8-μm intensity within the patera; this is converted to temperature and lava age maps as described later in the text. Retrievals using models that span a wide range of parameters, resolutions and fitting algorithms all recover the same qualitative features in the intensity map.
Model intensity map
The base map for the intensity modelling is a patera outline derived from Voyager spacecraft imaging19 (see Fig. 3). The exact duration of ingress and egress yield the width of the warm patera area in the direction of motion to within a few kilometres. The widths derived for both ingress and egress match the Voyager shape to within uncertainties, indicating that the general size and shape of Loki Patera has not changed significantly in the past 36 years, and demonstrating that the use of this outline in the modelling does not introduce significant bias.
Within the fixed patera outline, the patera area is divided into pixels, and the value of each pixel is fitted independently in the retrievals. Pixel sizes from 2 km up to 40 km are tested, and two shapes are used. Diamond pixel shapes follow the ingress and egress directions: the edges of the diamonds are parallel to Europa’s limb as it crosses that portion of the patera, minimizing the number of light curve points that constrain the value of each pixel. The diamond shape is useful for comparing between the light curve and the intensity distribution, and in particular for identifying artefacts that are caused by small numbers of anomalous points in the light curve. However, the final maps presented here make use of square pixels, where the value of each pixel is constrained by a larger number of timesteps. The pixel size determines the number of independently-fitted intensity units within the patera. However, the model treats partial pixel coverage by Europa’s limb with an accuracy down to subkilometre scales. The maps shown in Fig. 3 use square pixels sized 2 km × 2 km.
Model light curve
Ephemeris information from the JPL Horizons database is used to determine the position of Europa’s limb relative to Loki Patera. The time resolution of the available ephemerides is lower than the observing cadence, and the ephemeris values are therefore linearly interpolated to each observation time based on the bracketing timesteps. At each timestep, the relative positions of Io and Europa are read from the ephemeris; the location of each point within Loki Patera is calculated relative to Io’s centre; and the resultant distance from Europa’s centre to each point within Loki Patera is compared to Europa’s radius to determine if that point is obscured. The total intensity in the unobscured portion of the patera corresponds to the simulated light curve value at that timestep. By using ephemeris information for each timestep, the movement of both Io and Europa are accounted for, as is Io’s rotation over the course of the event. Extended Data Fig. 2 demonstrates model light curves for simple models with uniform intensity distributions within the patera.
Fitting methods
The model light curves are fitted to the observations by allowing all pixels in the model intensity map to vary as free parameters in the fit. Multiple fitting algorithms were tested, including Markov chain Monte Carlo (MCMC) simulation25, bounded limited-memory Broyden–Fletcher–Goldfarb–Shanno (BFGS) optimization26, and the truncated Newtonian algorithm (TNC)27. All fitting methods produce similar qualitative results. The TNC algorithm is chosen for the fits presented here because it is significantly faster than MCMC and produces less artefacts in the intensity maps than the limited-memory BFGS optimization.
Model selection
The presence of correlated noise in the light curve (Fig. 2) requires a careful analysis of goodness-of-fit metrics to avoid over-fitting the data and introducing artefacts into the modelled intensity maps. The fitting algorithms rely on minimizing χ2 to within a specified fit tolerance. However, χ2 is not a meaningful metric for determining fit quality or comparing between models because the model complexity is not accurately represented by the number of free parameters, nor is the model complexity easy to quantify28,29. It is therefore not possible to determine whether a model is under-fitting or over-fitting the data by looking at χ2 alone.
An alternative method for determining whether the model provides a good fit is the Kolmogorov–Smirnov test (KS-test) P value30,31. The KS-test uses the distribution of the residuals from a given model to determine whether the residuals could have been drawn from a normal distribution, as would be the case for random noise. If the P value is below 0.01, the hypothesis that the residuals are drawn from a normal distribution is rejected with 99% significance; a P value greater than 0.01 indicates consistency with a normal distribution.
The standard KS-test is based on the assumption that noise in the dataset is random. However, the occultation light curve contains non-random noise, and the standard KS-test is therefore not a good assessment of model fit. Instead, the two-sample KS-test is employed, which compares the residuals to a more realistic noise distribution based on the dataset itself. Given a reference noise distribution, the two-sample KS-test evaluates whether the residuals from the light curve model fit are consistent with the reference noise level. Two reference noise distributions are considered in this analysis: the baseline noise of Loki Patera in the approximately 10 s before ingress and the approximately 10 s immediately post-egress, and the residuals on the simultaneous intensity of Pillan Patera. Because Pillan Patera was occulted during the Loki Patera egress, the latter method can only be applied to the Loki Patera ingress.
For a given pixel shape and size, the preferred model is chosen to correspond to the loosest fit whose residual distribution is consistent with the best noise distribution available. In the case of ingress, this is the simultaneous noise distribution of Pillan Patera, while on egress this is the post-egress baseline level of Loki Patera. Extended Data Fig. 3 shows example fits using square 8-km pixels (lower than the resolution of the final maps) for a range of fit tolerances. The corresponding model light curves are shown in Extended Data Fig. 4 and the P values are given in Extended Data Table 2. The preferred model is the loosest fit for which the residuals are consistent with the expected noise at 99% significance (Fit C in Extended Data Fig. 3). This requirement ensures that the light curve is neither under-fitted nor over-fitted.
In addition, the optimal fit can be identified qualitatively as the closest fit that stays consistent with the broad-strokes distribution represented by the loosest fit (Fit A in Extended Data Fig. 3). As the fit constraints tighten, the big-picture distribution stays consistent but becomes more resolved. However, around Fits D and E the distribution deviates and prominent striping artefacts appear. Fits C and D demonstrate this turnaround point, where the light curve is being fitted closely but artefacts are only just beginning to appear. Using this criterion, the retrieved intensity distribution on the patera floor is not highly sensitive to the number of independent pixels that are fitted, nor to the shape of the pixels (see Extended Data Fig. 5).
Retrieval accuracy
Our model selection is based on the assumption that the striping structure in Fits E and F in Extended Data Fig. 3 is due to noise in the data, although we cannot rule out the possibility that some of this structure represents real temperature structure in the patera. The assumption that the striping is an artefact is supported by (1) the fact that the presence of real structure within the patera that coincidentally aligns exactly along the directions of Europa’s limb is improbable; and (2) the comparison between square and diamond pixel maps (Extended Data Fig. 5), which demonstrates that the striping effect arises primarily when the pixel shape is determined by the orientation of Europa’s limb and thus constrained by the minimum number of light curve points.
In this type of reconstruction, there is some inherent non-uniqueness in the retrieved temperature structure. In particular, structure at small spatial scales cannot be uniquely recovered because the length of the limb of Europa across Loki Patera is many tens of kilometres and will homogenize variations over considerably smaller spatial scales. We test the sensitivity of the technique to discrete small-scale features in the patera using simulated intensity maps with Gaussian features of different sizes and brightnesses superposed on a background patera of uniform brightness. We generate simulated light curves from the maps at the same time sampling as the data, add noise to each data point based on the noise in the dataset, and reconstruct the images using methods identical to those applied to the LBT data. Extended Data Fig. 6 shows retrievals of simulated bright spots within the patera that constitute 5%–15% of Loki Patera’s total brightness and vary from 10 km to 40 km in size (full-width at half-maximum of the bright feature). Localized features that contribute below 5% of Loki Patera’s intensity are generally undetectable. The retrievals demonstrate that the existence and location of small, bright features can be recovered in most cases. However, in the case of small (≤20 km) features, the shape of the feature tends to be blurred out in the retrieved map. In addition, small bright features in certain locations produce artefacts along either of the two directions oriented with Europa’s limb during the occultation (see Extended Data Fig. 6d and e).
The smoothness of the temperature map shown in Fig. 3 should therefore be viewed with some caution, as the retrievals tend to smooth out small, discrete features and are additionally insensitive to localized features that constitute only a few per cent of the total patera intensity. However, the presence of the broad-scale temperature gradient from the northwest to the southeast of the patera is not susceptible to these ambiguities. Thus while the LBT observations do not constrain the presence of localized non-uniformities in the resurfacing, the existence of a coherent volcanic process acting across both the northern and southern patera regions is robust.
As a simple test, we apply the same methods to retrieve the temperature map shown in Fig. 4 for day ΔT = 250 days, which approximates the LBT map. Extended Data Fig. 7a and c demonstrate that the smooth gradient across the northern and southern parts of the patera is retrieved well. For comparison, we perform the same analysis on a simulated temperature map whose azimuthally smoothed intensity profile is comparable to that of the LBT map, but which models the temperature gradient as a series of discrete bright features. As demonstrated in Extended Data Fig. 7b and d, the discreteness of the underlying temperature map is evident in the reconstruction, despite the similarities between the model light curves (shown in Extended Data Fig. 7e and f ).
Temperature map
The 4.8-μm intensity map derived by fitting the occultation light curve is converted to a temperature map via the Planck function, which gives the spectral radiance as a function of wavelength and temperature. An emissivity value of ε = 1 is used for this conversion, and it is assumed that the emission fills each pixel. The geometric foreshortening as a function of location within the patera is corrected for, but the change in the foreshortening during the occultation event is below 1% and is not corrected. The uncertainty in the flux calibration corresponds to an uncertainty in temperature on each pixel. However, the spectral radiance is very sensitive to small changes in temperature, and the flux calibration uncertainty leads to an uncertainty of only ±1 K on the temperature map, well below the level of uncertainty resulting from systematic noise in the light curve.
Age map
The temperature distribution within the patera is shown in Fig. 3 alongside the lava age distribution based on a model which assumes a cooling lava crust on top of a basaltic lava lake18,32. Newly exposed silicate lava cools predictably, allowing a derived surface temperature to be mapped to a time since emplacement18,33. Once lava thermophysical values are selected (we use values for basalt1,32), the model balances surface radiant heat loss with the conduction of heat through a thickening crust, including liberated latent heat as lava solidifies onto the base of the crust. Heat loss is buffered by the release of latent heat until the lava flow is completely solidified, after which the surface temperature falls off rapidly32. A lava lake is treated as a semi-infinite body, so latent heat release is always present. The lava lake and lava flow surface cooling models diverge once the lava flow is completely solid. However, the periodic resurfacing of Loki Patera resets the lava cooling clock before complete solidification occurs, and this difference therefore cannot be used to distinguish between the two models.
Figure 4 demonstrates the determination of resurfacing rates in the northern and southern parts of the patera, based on the derived lava age map. The uncertainty on the derived ages resulting from uncertainty in the absolute flux calibration ranges from 2 days for the warmer parts of the patera (about 330 K) to 12 days for the coolest temperatures (approximately 270 K). The exact lava cooling ages in the cooler regions should therefore be viewed with caution, although in all parts of the patera uncertainties due to time-dependent noise and an incomplete understanding of the thermal properties of the lava dominate over flux calibration effects.
In addition, if the differences in magma composition or volatile content between the northern and southern parts of the patera are significant, the corresponding cooling curves may also differ. Although this introduces some degeneracy between cooling rate and resurfacing rate, either interpretation points to a regional difference in magma composition or volatile content within the patera.
Central island
Models produced from basemaps of Loki Patera with and without a cool central island indicate that many of the large-scale features of the light curve can be reproduced by including this island (Extended Data Fig. 2). The ingress light curve in particular can be matched almost perfectly just by adding the island, although matching the egress light curve requires the addition of a non-uniform intensity distribution. In addition, in a model where the island pixels are also treated as free parameters in the fits, the presence of the island is recovered. As the fit is tightened, the values of the island pixels trend towards zero, and the fits thus recover the island even in the absence of any assumptions about it. Fits with 8 km × 8 km pixels where the island pixels are free are shown in Extended Data Fig. 8; Fit C is the preferred model based on the distribution of the light curve residuals, and recovers the location and size of the island although not the exact outline seen in Voyager images (see Fig. 3). The cracks through the island observed by Galileo4 are below our detectability threshold (constituting less than one part in ten thousand of the total emission from Loki Patera), and were not included in our models.
Code availability
We have opted not to make the code available because the technique described is non-standard and custom routines were developed for the analysis.
Data availability
The datasets generated and analysed during this study are available from the corresponding author upon reasonable request.
References
Davies, A. G. in Volcanism on Io: A Comparison with Earth 217–228 (Cambridge Univ. Press, 2007)
Lopes, R. & Spencer, J. (eds) Io after Galileo (Springer-Praxis, 2007)
Veeder, G. et al. Io: heat flow from dark paterae. Icarus 212, 236–261 (2011)
Lopes-Gautier, R. et al. A close-up look at Io from Galileo’s Near-Infrared Mapping Spectrometer. Science 288, 1201–1204 (2000)
Rathbun, J., Spencer, J., Davies, A. G., Howell, R. & Wilson, L. Loki, Io: a periodic volcano. Geophys. Res. Lett. 29, http://dx.doi.org/10.1029/2002GL014747 (2002)
Spencer, J. et al. Io’s thermal emission from the Galileo Photopolarimeter-Radiometer. Science 288, 1198–1201 (2000)
Rathbun, J. et al. Mapping of Io’s thermal radiation by the Galileo Photopolarimeter-Radiometer (PPR) instrument. Icarus 169, 127–139 (2004)
Howell, R. & Lopes, R. The nature of volcanic activity at Loki: insights from Galileo NIMS and PPR data. Icarus 186, 448–461 (2007)
Davies, A. G. Temperature, age and crust thickness distributions of Loki Patera on Io from Galileo NIMS data: implications for resurfacing mechanism. Geophys. Res. Lett. 30, 2133 (2003)
Veeder, G., Matson, D., Johnson, T., Blaney, D. & Goguen, J. Io’s heat flow from infrared radiometry: 1983–1993. J. Geophys. Res. 99, 17095–17162 (1994)
Howell, R. Thermal emission from lava flows on Io. Icarus 127, 394–407 (1997)
Esposito, S. et al. Large Binocular Telescope Adaptive Optics system: new achievements and perspectives in adaptive optics. Proc. SPIE 8149, 814902 (2011)
Hinz, P. et al. First AO-corrected interferometry with LBTI: steps towards routine coherent imaging observations. Proc. SPIE 8445, 84450U (2012)
Leisenring, J. et al. On-sky operations and performance of LMIRcam at the Large Binocular Telescope. Proc. SPIE 8446, 84464F (2012)
Spencer, J., Clark, B., Toomey, D., Woodney, L. & Sinton, W. Io hot spots in 1991: results from Europa occultation photometry and infrared imaging. Icarus 107, 195–208 (1994)
de Kleer, K. & de Pater, I. Io’s Loki Patera: modeling of three brightening events in 2013–2016. Icarus 289, 181–198 (2017)
Turtle, E. et al. The final Galileo SSI observations of Io: orbits G28–O33. Icarus 169, 3–28 (2004)
Matson, D. et al. Io: Loki Patera as a magma sea. J. Geophys. Res. 111, 2156–2022 (2006)
Veeder, G. et al. Io: Volcanic thermal sources and global heat flow. Icarus 219, 701–722 (2012)
Hill, J. M., Green, R. F. & Slagle, J. H. The Large Binocular Telescope. Proc. SPIE 6267, 62670Y (2006)
Leisenring, J. et al. Fizeau interferometric imaging of Io volcanism with LBTI/LMIRcam. Proc. SPIE 9146, 91462S (2014)
Maire, A.-L. et al. The LEECH exoplanet imaging survey. Further constraints on the planet architecture of the HR 8799 system. Astron. Astrophys. 576, A133 (2015)
Conrad, A. et al. Spatially resolved M-band emission from Io’s Loki Patera — Fizeau imaging at the 22.8 m LBT. Astron. J. 149, 175–184 (2015)
Lim, P. L ., Diaz, R. I. & Laidler, V. PySynphot Users Guide (STSci, 2015)
Foreman-Mackey, D. et al. emcee: the MCMC hammer. Publ. Astron. Soc. Pacif. 125, 925 (2013)
Byrd, R ., Lu, P ., Nocedal, J . & Schnabel, R. A limited memory algorithm for bound constrained optimization. SIAM J. Sci. Statist. Comput. 16, 1190–1208 (1995)
Dembo, R. & Steihaug, R. Truncated-Newtonian algorithms for large-scale unconstrained optimization. Math. Program. 26, 190–212 (1983)
Andrae, R. Error estimation in astronomy: a guide. Preprint at http://arXiv.org/abs/1009.2755 (2010)
Andrae, R., Schulze-Hartung, T. & Melchior, P. Dos and don’ts of reduced chi-squared. Preprint at http://arXiv.org/abs/1012.3754 (2010)
Kolmogorov, A. Sulla determinazione empirica di una legge di distribuzione. Giornale Istituto Italiano 4, 1–11 (1933)
Smirnov, N. Table for estimating the goodness of fit of empirical distributions. Ann. Math. Stat. 19, 279–281 (1948)
Davies, A. G., Matson, D., Veeder, G., Johnson, T. & Blaney, D. Post-solidification cooling and the age of Io’s lava flows. Icarus 176, 123–137 (2005)
Davies, A. G. Io volcanism: thermo-physical models of silicate lava compared with observations of thermal emission. Icarus 124, 45–61 (1996)
Acknowledgements
The Large Binocular Telescope (LBT) is an international collaboration among institutions in the United States, Italy and Germany. The LBT Corporation partners are: the University of Arizona on behalf of the Arizona university system; Istituto Nazionale di Astrofisica, Italy; LBT Beteiligungsgesellschaft, Germany, representing the Max Planck Society, the Astrophysical Institute Potsdam, and Heidelberg University; The Ohio State University; and The Research Corporation, on behalf of The University of Notre Dame, University of Minnesota and University of Virginia. The LBT Interferometer is funded by NASA as part of its Exoplanet Exploration program. The LMIRcam instrument is funded by the US NSF through grant NSF AST-0705296. A.G.D., K.d.K. and I.d.P. are partially supported by the NSF grant AST-1313485 to UC Berkeley and by the NSF Graduate Research Fellowship to K.d.K. under grant DGE-1106400. A.G.D. thanks the NASA Outer Planets Research Program for support under grant OPR NNN13D466T.
Author information
Authors and Affiliations
Contributions
A.C., A.S., D.D., J.L., M.S., P.H., C.V. and C.E.W. developed and operated the instrumentation used to obtain these observations. A.C., A.S., A.V., D.D., E.S., K.d.K., P.H. and V.B. took the data. A.R., J.L. and M.S. performed the data reduction and calibration. K.d.K. and M.S. analysed the data. A.G.D., I.d.P., J.L., K.d.K. and M.S. wrote the main text and the Methods section.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing financial interests.
Additional information
Reviewer Information Nature thanks F. Marchis and J. Spencer for their contribution to the peer review of this work.
Publisher's note: Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Extended data figures and tables
Extended Data Figure 1 Io disk subtraction.
a, b, Image of Io from the LBTI during the occultation, both before (a) and after (b) the subtraction of the reflected light from Io’s disk. In each image, Loki Patera is at upper left and Pillan Patera at lower right. The residual intensity around the limb in the subtracted image is the result of imperfect limb darkening correction.
Extended Data Figure 2 Uniform-intensity models.
Main panels, ingress and egress light curves from models with a uniform intensity distribution within Loki Patera, with (bottom row) and without (top row) a central island, plotted with the data and 1σ uncertainties. The patera outline is derived from Voyager imaging data19, and the model light curves in each row correspond to the image in the left panel of that row. It can be clearly seen from a comparison between the rows that the patera shape and the central island produce the broad-scale features of the ingress light curve, even without postulating a non-uniform intensity distribution. However, the addition of a non-uniform intensity distribution is required to match the egress light curve, indicating that the main temperature gradient is in the direction of motion of Europa’s limb during egress (roughly northwest to southeast).
Extended Data Figure 3 Intensity maps corresponding to progressively closer fits.
Shown are intensity reconstructions with independently-fitted pixels sized 8 km × 8 km based on fits to the light curve. The series demonstrates the artefacts from systematic noise in the light curve that become increasingly prominent as the fits tighten. Panels a–f correspond to Fits A–F discussed in the text. The fit metrics are summarized in Extended Data Table 2; Fit C is the preferred model at this resolution. The arrows at the left show the approximate direction of movement of Europa’s limb during ingress and egress, demonstrating that the orientation of the limb corresponds to the striping artefacts in Fits E and F.
Extended Data Figure 4 Model light curves and residuals.
Shown are model light curves for ingress and egress (with residual plots under) corresponding to the intensity maps for Fits A–F shown in Extended Data Fig. 3, plotted with the observed light curve and 1σ uncertainties (error bars).
Extended Data Figure 5 Preferred models for a range of pixel sizes and two pixel shapes.
The image titles indicate the size of each pixel in kilometres; top row, square pixels; bottom row, diamond pixels. The edges of the diamond pixels are parallel to the limb of Europa as it passes that portion of Loki Patera. Note the artefacts in the small-pixel models with diamond pixel shapes; in these models, as few as two timesteps influence the value of each pixel, and the model is thus very sensitive to noise in the light curve. These images demonstrate that the retrieved intensity distribution is consistent across different model parameters and resolutions. See Methods for details.
Extended Data Figure 6 Retrieval of simulated temperature maps.
The simulated maps (top row) include discrete hot features of Gaussian brightness distribution on top of a uniformly bright background patera. The bright spot constitutes about 15% of the patera’s total intensity in panels a–e, and approximately 7.5% of the intensity in panels f–h, and ranges in size from 10 km to 40 km (full-width at half-maximum of the feature). The retrieved maps (bottom row) are generated using the same methods applied to the LBT data, based on light curves corresponding to each intensity map with realistic noise added. The figure demonstrates that the presence and location of localized hot features of these brightness levels can be accurately retrieved by the analysis methods, but not their exact shape or size.
Extended Data Figure 7 Retrieval of simulated temperature maps with global gradient.
The simulated maps (a, b) demonstrate two possible models with similar azimuthally smoothed intensity profiles and an overall increase in brightness towards the southeast of the patera. The retrieved maps (c, d) were produced using the same procedure by which the LBT map was produced, based on the simulated light curves (e, f), which include realistic noise. The retrieved maps demonstrate that these scenarios are clearly distinguished by the retrieval process, despite the similarities between the model light curves.
Extended Data Figure 8 Model fits without the central island.
Shown are intensity reconstructions based on light curve fits using models with 8 km × 8 km square pixels, treating the intensity of the pixels in the island as free parameters in the fit. Without making any assumptions about the island, the fits recover its presence. Panels a–d demonstrate increasingly tight fits to the light curve; the preferred model on the basis of the corresponding light curve residuals is c here. Panels a–d correspond to Fits A–D discussed in the text.
Rights and permissions
About this article

Cite this article
de Kleer, K., Skrutskie, M., Leisenring, J. et al. Multi-phase volcanic resurfacing at Loki Patera on Io. Nature 545, 199–202 (2017). https://doi.org/10.1038/nature22339
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1038/nature22339
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
