
Abstract
In this paper, we consider the stochastic fractional Chen Lee Liu model (SFCLLM). We apply the mapping method in order to get hyperbolic, elliptic, rational and trigonometric stochastic fractional solutions. These solutions are important for understanding some fundamentally complicated phenomena. The acquired solutions will be very helpful for applications such as fiber optics and plasma physics. Finally, we show how the conformable derivative order and stochastic term affect the exact solution of the SFCLLM.
Similar content being viewed by others

Introduction
Stochastic evolution equations are mathematical equations used to interpret the evolution of a system over time, taking into account both deterministic and random influences. They are widely used in various scientific disciplines, including physics, biology, and finance, to analyze complex systems that exhibit random behavior1,2. Stochastic evolution equations provide a powerful framework to study the dynamics of such systems, allowing scientists and researchers to better understand their behavior and make predictions. Because of the relevance of stochastic evolution equations, various methods have been developed to solve them, including He’s semi-inverse3, mapping method4, Jacobi elliptic function method5, Riccati equation mapping6, modified tanh–coth method7,8, modified fractional sub-equation method9, exp-function method10, and so on.
On the other hand, fractional evolution equations provide a powerful mathematical tool for modeling and understanding complex systems with long-range interactions. By incorporating fractional derivatives into the equations, these models can capture memory effects and interpolate between different classes of differential equations. The diverse applications of fractional evolution equations make them a valuable tool for researchers in various fields to analyze and simulate a wide range of phenomena, leading to a deeper understanding of complex systems11,12,13,14,15. Recently, there are numerous useful and effective techniques for solving these problems, such as modified simple equation method16, first integral method17, generalized Kudryashov method18, extended tanh–coth method19,20,21, exp-function method22, Jacobi elliptic function23, F-expansion technique24, and etc.
In this paper, we consider the stochastic fractional Chen Lee Liu model (SFCLLM) as follows25:
where \(\mathcal {G}\) is the the normalized electric-field envelope, \( \mathcal {D}_{x}^{\alpha }\) is a conformable fractional derivative (CFD), a, b and \(\rho \) are positive constants, and \(\mathcal {B}_{t}=\frac{\partial \mathcal {B}}{\partial t}\) is the derivative of the Brownain motion \(\mathcal { B}(t).\)
Due to the importance of the Chen Lee Liu model in fiber optics and plasma physics, many authors have used several methods in order to acquire the analytical solutions for this model such as Laplace Adomian decomposition method26, chirped W shaped optical solitons27, Darboux transformation28, modified extended tanh-expansion method29, Sardar sub-equation method30, Riccati–Bernoulli and generalized tanh methods31, (\(G^{^{\prime }}/G,1/G)\)-expansion approach32, extended direct algebraic method33, and modified Khater method34.
The purpose of this paper is to create the exact solutions of the SFCLLM (1). We apply the mapping method to produce a variety of solutions for instance hyperbolic, trigonometric, rational, and elliptic functions. Furthermore, we use Matlab program to create 2D and 3D graphs for some of the analytical solutions established in this paper to address the impact of the conformable fractional derivative and time-dependent coefficient on the acquired solutions of the SFCLLM (1).
The paper is organized as described below. In “Conformable derivative”, we define the CFD and describe some of its features. To attain the wave equation of the SFCLLM (1), we utilize an appropriate wave transformation in “Wave equation for SFCLLM”. In “The solutions of the SFCLLM”, we find the exact solutions of the SFCLLM (1) using the mapping method . In “Impacts of CD and noise”, we address the impact of the CFD and stochastic term on the attained solutions. Finally, the conclusion of the paper is introduced.
Conformable derivative
Fractional calculus operators are an effective tool for modeling and evaluating complicated processes that cannot be effectively explained using regular integer-order calculus. Several types of fractional derivative operators have been suggested in the literature, including the Katugampola derivative, the Jumarie derivative, the Hadamard derivative, the Riemann–Liouville derivative, the Caputo derivative, and the Grünwald–Letnikov derivative35,36,37,38. In recent years, Khalil et al.40 proposed the conformable derivative (CD), which has features similar to Newton derivative. From here, let us define the CD for the function \(\mathcal {P}:(0,\infty )\rightarrow \mathbb {R} \) of order \(\alpha \in (0,1]\ \)as follows:
The CD fulfills the next properties for any constant a and b:
-
\(\mathcal {D}_{x}^{\alpha }[a\mathcal {P}_{1}(x)+b\mathcal {P}_{2}(x)]=a \mathcal {D}_{x}^{\alpha }\mathcal {P}_{1}(x)+b\mathcal {D}_{x}^{\alpha } \mathcal {P}_{2}(x),\)
-
\(\mathcal {D}_{x}^{\alpha }[\mathcal {P}_{1}(x)\mathcal {P}_{2}(x)]= \mathcal {P}_{2}(x)\mathcal {D}_{x}^{\alpha }\mathcal {P}_{1}(x)+\mathcal {P} _{1}(x)\mathcal {D}_{x}^{\alpha }\mathcal {P}_{2}(x),\)
-
\(\mathcal {D}_{x}^{\alpha }[a]=0,\)
-
\(\mathcal {D}_{x}^{\alpha }[x^{b}]=bx^{b-\alpha }\),
-
\(\mathcal {D}_{x}^{\alpha }\mathcal {P}(x)=x^{1-\alpha }\frac{d\mathcal {P }}{dx}\),
-
\(\mathcal {D}_{x}^{\alpha }(\mathcal {P}_{1}\circ \mathcal {P} _{2})(x)=x^{1-\alpha }\mathcal {P}_{2}^{\prime }(x)\mathcal {P}_{1}^{\prime }( \mathcal {P}_{2}(x))\).
Wave equation for SFCLLM
To attain the wave equation of the SFCLLM (1), we utilize
where \(\varphi \) is a real deterministic function. Plugging Eq. (2) into Eq. (1) and using
we get for imaginary part
and for real part
where
Taking expectation \(\mathbb {E[\cdot ]}\) on both sides of Eq. (4):
Since \(\mathcal {B}(t)\) is a Gaussain process, then
The solutions of the SFCLLM
To find the solutions of Eq. (7), we use the mapping method, which is stated in40. Assuming the solutions of Eq. (7) take the form
where \(a_{i}(t)\) are undefined functions in t for \(i=0,1,....,\ M\), and \( \mathcal {X}\) is the solution of
where \(b_{1},b_{2}\) and\(\ b_{3}\) are real constants.
By balancing \(\varphi ^{\prime \prime }\) with \(\varphi ^{3}\) in Eq. (7), we can calculate M as
With \(M=1\), Eq. (8) becomes
Differentiating Eq. (10) two times and utilizing (9), we have
We obtain by substituting Eqs. (10) and (11) into Eq. (7)
For \(i=3,2,1,0,\ \)we put all coefficient of \(\mathcal {X}^{i}\) equal zero to get
and
Solving these equations yields:
By using Eqs (2), (10) and (12), the solution of SFCLLM (1) is
There are many sets depending on \(b_{1},\ b_{2}\) and \(b_{3}:\)
Set 1: If \(b_{1}=\tilde{n}^{2},\ b_{2}=-(1+\tilde{n}^{2})\) and\(\ b_{3}=1,\) then \(\mathcal {X}(\xi )=sn(\theta _{\alpha }).\) Therefore, by using Eq. (13), the solution of SFCLLM (1) is
At \(\tilde{n}\rightarrow 1,\) Eq. (14) becomes
Set 2: If \(b_{1}=1,\ b_{2}=2\tilde{n}^{2}-1\) and\(\ b_{3}=-\tilde{n} ^{2}(1-\tilde{n}^{2}),\) then \(\mathcal {X}(\theta _{\alpha })=ds(\theta _{\alpha }).\) Consequently, the solution of SFCLLM (1), by using Eq. ( 13), is
When \(\tilde{n}\rightarrow 1,\) Eq. (16) is typically
At \(\tilde{n}\rightarrow 0,\) Eq. (16) tends to
Set 3: If \(b_{1}=-\tilde{n}^{2},\ b_{2}=2\tilde{n}^{2}-1\) and\(\ b_{3}=1-\tilde{n}^{2},\) then \(\mathcal {X}(\theta _{\alpha })=cn(\theta _{\alpha })\). Consequently, the solution of SFCLLM (1) is
When \(\tilde{n}\rightarrow 1,\) Eq. (19) is typically
Set 4: If \(b_{1}=\frac{\tilde{n}^{2}}{4},\ b_{2}=\frac{(\tilde{n} ^{2}-2)}{2}\) and\(\ b_{3}=\frac{1}{4},\) then \(\mathcal {X}(\theta _{\alpha })= \frac{sn(\theta _{\alpha })}{1+dn(\theta _{\alpha })}.\) Consequently, the solution of SFCLLM (1) is
At \(\tilde{n}\rightarrow 1,\) Eq. (21) tends to
Set 5: If \(b_{1}=\frac{(1-\tilde{n}^{2})^{2}}{4},\ b_{2}=\frac{(1- \tilde{n}^{2})^{2}}{2}\) and\(\ b_{3}=\frac{1}{4},\) then \(\mathcal {X}(\theta _{\alpha })=\frac{sn(\theta _{\alpha })}{dn(\theta _{\alpha })+cn(\theta _{\alpha })}.\) Therefore, the solution of SFCLLM (1) is
If \(\tilde{n}\rightarrow 0,\) then Eq. (23) is typically
Set 6: If \(b_{1}=\frac{1-\tilde{n}^{2}}{4},\ b_{2}=\frac{(1-\tilde{n }^{2})}{2}\) and\(\ b_{3}=\frac{1-\tilde{n}^{2}}{4},\) then \(\mathcal {X}(\theta _{\alpha })=\frac{cn(\theta _{\alpha })}{1+sn(\theta _{\alpha })}\). Consequently, the solution of SFCLLM (1) is
At \(\tilde{n}\rightarrow 0,\) Eq. (25) turns to
Set 7: If \(b_{1}=1,\ b_{2}=0\) and\(\ b_{3}=0,\) then \(\mathcal {X} (\theta _{\alpha })=\frac{c}{\theta _{\alpha }}.\ \)Therefore, the solution of SFCLLM (1) is
Set 8: If \(b_{1}=1,\ b_{2}=2-\tilde{n}^{2}\) and\(\ b_{3}=(1-\tilde{n} ^{2}),\) then \(\mathcal {X}(\theta _{\alpha })=cs(\theta _{\alpha }).\) Therefore, the solution of SFCLLM (1) is
At \(\tilde{n}\rightarrow 1,\) Eq. (28) is typically
If \(\tilde{n}\rightarrow 0,\) then Eq. (28) becomes
Set 9: If \(b_{1}=\frac{-1}{4},\ b_{2}=\frac{\tilde{n}^{2}+1}{2}\) and \(\ b_{3}=\frac{-(1-\tilde{n}^{2})^{2}}{2},\) then \(\mathcal {X}(\theta _{\alpha })=\tilde{n}cn(\theta _{\alpha })+dn(\theta _{\alpha }).\ \) Therefore, the solution of SFCLLM (1) is
When \(\tilde{n}\rightarrow 1,\) Eq. (31) tends to Eq. (20 ).
Set 10: If \(b_{1}=\frac{\tilde{n}^{2}-1}{4},\ b_{2}=\frac{\tilde{n} ^{2}+1}{2}\) and\(\ b_{3}=\frac{\tilde{n}^{2}-1}{4},\) then \(\mathcal {X}(\theta _{\alpha })=\frac{dn(\theta _{\alpha })}{1+sn(\theta _{\alpha })}.\ \)Hence, the solution of SFCLLM (1) is
When \(\tilde{n}\rightarrow 0,\) Eq. (32) is typically
Set 11: If \(b_{1}=-1,\ b_{2}=2-\tilde{n}^{2}\) and\(\ b_{3}=\tilde{n} ^{2}-1,\) then \(\mathcal {X}(\theta _{\alpha })=dn(\theta _{\alpha }).\ \) Therefore, the solution of SFCLLM (1) is
If \(\tilde{n}\rightarrow 1,\) then Eq. (34) turns to Eq. (20).
Impacts of CD and noise
Impacts of CD
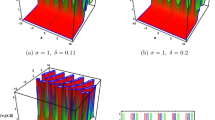
Now, we analyze the influence of CD on the obtained solutions of the SFCLLM (1). Suitable values are assigned to the unknown variables to construct a sequence of two- and three-dimensional graphs. Figures 1 and 2 represent the behavior solutions of Eqs. (14) and ( 15), respectively. Figure 1 displays the dark solutions \( \left| \mathcal {G}(x,t)\right| \) described in Eq. (14) for \(\zeta _{1}=1,\ \zeta _{2}=-2,\ \theta _{1}=\sqrt{2},\ a=b=1,\ \tilde{n} =0.5,\ \rho =0,\ x\in [0,4]\), \(t\in [0,3]\) and for \(\alpha =1,\ 0.8,\ 0.6\). While, Fig. 2 displays the periodic solutions \(\left| \mathcal {G}(x,t)\right| \) described in Eq. (15)for \(\zeta _{1}=1,\ \zeta _{2}=-2,\ \theta _{1}=\sqrt{2},\ a=b=1,\ \rho =0,\ x\in [0,4]\), \(t\in [0,3]\) and for \(\alpha =1,\ 0.8,\ 0.6.\ \)From these figures, we deduce that when the derivative order \(\alpha \) of CD increases, the surface shrinks.


Impacts of noise
Now, we study the impact of the time-dependent coefficients on the acquired solutions of the SFCLLM (1). Figure 3 displays the solutions \(\left| \mathcal {G}(x,t)\right| \) described in Eq. (14) for \(\zeta _{1}=1,\ \zeta _{2}=-2,\ \theta _{1}=\sqrt{2 },\ a=b=1,\ \tilde{n}=0.5,\ \alpha =1,\ x\in [0,4]\), \(t\in [0,3]\) and for \(\rho =0,\ 1,\ 2\). While, Fig. 4 displays the solutions \( \left| \mathcal {G}(x,t)\right| \) described in Eq. (15) for \(\zeta _{1}=1,\ \zeta _{2}=-2,\ \theta _{1}=\sqrt{2},\ a=b=1,\ \alpha =1,\ x\in [0,4]\), \(t\in [0,3]\) and for \(\rho =0,\ 1,\ 2\). From Figs. 3 and 4, we observe that when the noise strength increases, the surface stabilizes around zero.


Discussion and physical interpretation
This work aimed to get exact solutions of the SFCLLM (1). We used the mapping approach, which yielded a variety of solutions, including periodic solutions, kink solutions, brilliant solutions, dark optical solutions, solitary solutions, and so on. Physically, dark optical soliton denotes waves with lower intensities than the backdrop. Singular solitons are solitary waves with discontinuous derivatives, including compactions with limited (compact) support or peakons with discontinuous first derivatives. These kinds of solitary waves are very important owing to their efficiency and of course flexibility in long distance optical communication. We investigated the influence of conformable derivatives on the obtained solutions and concluded that as the order of fractional derivatives increases, the surface shrinks, as depicted in Figs. 1 and 2. Furthermore, we examined the impact of noise on the solutions and observed that when the noise strength increases, the surface stabilizes around zero as shown in Figs. 3 and 4.
Conclusions
In this paper, we introduced a large variety of exact solutions to the stochastic fractional Chen Lee Liu model (SFCLLM) (1) forced by multiplicative noise in the Itô sense. By using the mapping approach, rational, elliptic, hyperbolic, and trigonometric stochastic fractional solutions were obtained. These solutions are important for understanding some fundamentally complicated phenomena. The attained solutions are very helpful for applications such as optics, plasma physics and nonlinear quantum mechanics. Finally, we show how the conformable derivative order and the stochastic term affect the exact solution of the SFCLLM (1).
Data availability
The datasets used and/or analyzed during the current study are available from the corresponding author upon reasonable request.
References
Arnold, L. Random Dynamical Systems (Springer, 1998).
Imkeller, P. & Monahan, A. H. Conceptual stochastic climate models. Stoch. Dyn. 2, 311–326 (2002).
Albosaily, S., Elsayed, E. M., Albalwi, M. D. & Alesemi, M. The analytical stochastic solutions for the stochastic potential Yu–Toda–Sasa–Fukuyama equation with conformable derivative using different methods. Fractal Fract. 7(11), 787 (2023).
Mohammed, W. W., Al-Askar, F. M. & Cesarano, C. On the dynamical behavior of solitary waves for coupled stochastic Korteweg–De Vries equations. Mathematics 11, 3506 (2023).
Al-Askar, F. M. & Mohammed, W. W. The analytical solutions of the stochastic fractional RKL equation via Jacobi elliptic function method. Adv. Math. Phys. 2022, 1534067 (2022).
Al-Askar, F. M., Cesarano, C. & Mohammed, W. W. The solitary solutions for the stochastic Jimbo–Miwa equation perturbed by white noise. Symmetry 15, 1153. https://doi.org/10.3390/sym15061153 (2023).
Ghany, H. A. Exact solutions for stochastic generalized Hirota–Satsuma coupled KdV equations. Chin. J. Phys. 49(4), 926–940 (2011).
Ghany, H. A. & Qurashi, M. A. Travelling solitary wave solutions for stochastic Kadomtsev–Petviashvili equation. J. Comput. Anal. Appl. 21, 121–131 (2015).
Ghany, H. A. & Hyder, A. A. Abundant solutions of Wick-type stochastic fractional 2D KdV equations. Chin. Phys. B 23, 060503 (2014).
Ghany, H. A., Hyder, A. A. & Zakarya, M. Exact solutions of stochastic fractional Korteweg de-Vries equation with conformable derivatives. Chin. Phys. B 29, 30203–030203 (2020).
Oldham, K. B. & Spanier, J. The Fractional Calculus: Theory and Applications of Differentiation and Integration to Arbitrary Order. Vol. 11 (Academic Press, 1974).
Miller, K. S. & Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations, A Wiley-Interscience Publication (Wiley, 1993).
Podlubny, I. Fractional Differential Equations. Vol. 198 (Academic Press, 1999).
Hilfer, R. Applications of Fractional Calculus in Physics (World Scientific Publishing, 2000).
Mohammed, W. W., Cesarano, C., Elsayed, E. M. & Al-Askar, F. M. The analytical fractional solutions for coupled Fokas system in fiber optics using different methods. Fractal Fract. 7, 556 (2023).
Cevikel, A. C. & Bekir, A. Assorted hyperbolic and trigonometric function solutions of fractional equations with conformable derivative in shallow water. Int. J. Mod. Phys. B 37, 2350084 (2023).
Cevikel, A. C. New exact solutions of the space–time fractional KdV-Burgers and nonlinear fractional foam drainage equation. Therm. Sci. 22, 15–24 (2018).
Cevikel, A. C. Soliton solutions of nonlinear fractional differential equations with its applications in mathematical physics. Rev. Mex. Fis. 67, 422–428 (2021).
Cevikel, A. C., Bekir, A., Arqub, O. A. & Abukhaled, M. Solitary wave solutions of Fitzhugh–Nagumo-type equations with conformable derivatives. Front. Phys. 10, 1028668 (2022).
Aksoy, E. & Cevikel, A. C. New travelling wave solutions of conformable Cahn–Hilliard equation. J. Math. Sci. Model. 5, 57–62 (2022).
Al-Askar, F. M. & Cesarano, C. Abundant solitary wave solutions for the Boiti–Leon–Manna–Pempinelli equation with M-truncated derivative. Axioms 12, 466 (2023).
Cevikel, A. C., Bekir, A. & Zahran, E. H. M. Novel exact and solitary solutions of conformable Huxley equation with three effective methods. J. Ocean Eng. Sci.https://doi.org/10.1016/j.joes.2022.06.010 (2024).
Al-Askar, F. M. & Mohammed, W. W. Abundant optical solutions for the Sasa–Satsuma equation with M-truncated derivative. Front. Phys. 11, 1216451 (2023).
Alshammari, M., Hamza, A. E., Cesarano, S., Aly, E. S & Mohammed, W. W. The analytical solutions to the fractional Kraenkel–Manna–Merle system in ferromagnetic materials. Fractal Fract. 7, 523 (2023).
Ozisik, M., Bayram, M., Secer, A. & Cinar, M. Optical soliton solutions of the Chen–Lee–Liu equation in the presence of perturbation and the effect of inter model dispersion, self-steepening and nonlinear dispersion. Opt. Quant. Electron. 54, 792 (2022).
Biswas, A. et al. Chirped optical solitons of Chen–Lee–Liu equation by extended trial equation scheme. Optik 156, 999–1006 (2018).
Su, T., Geng, X. & Dai, H. Algebro-geometric constructions of semi-discrete Chen–Lee–Liu equations. Phys. Lett. A 374, 3101–11 (2010).
González-Gaxiola, O. & Biswas, A. W-shaped optical solitons of Chen–Lee–Liu equation by Laplace–Adomian decomposition method. Opt. Quantum Electron. 50, 314 (2018).
Ozdemir, N. et al. Optical soliton solutions to Chen Lee Liu model by the modified extended tanh expansion scheme. Optik 245, 167643 (2021).
Esen, H., Ozdemir, N., Secer, A. & Bayram, M. On solitary wave solutions for the perturbed Chen–Lee–Liu equation via an analytical approach. Optik 245, 167641 (2021).
Yusuf, A., Inc, M., Aliyu, A. I. & Baleanu, D. Optical solitons possessing beta derivative of the Chen–Lee–Liu equation in optical fibers. Front. Phys. 7, 34 (2019).
Khatun, M. M. & Akbar, M. A. New optical soliton solutions to the space-time fractional perturbed Chen-Lee-Liu equation. Results Phys 46, 106306 (2023).
Hussain, A. et al. Dynamical behaviour of fractional Chen–Lee–Liu equation in optical fibers with beta derivatives. Results Phys. 18, 103208 (2020).
Tripathy, A. & Sahoo, S. New distinct optical dynamics of the beta-fractionally perturbed Chen–Lee–Liu model in fiber optics. Chaos Solitons Fractals 163, 112545 (2022).
Riesz, M. L’intégrale de Riemann–Liouville et le probl ème de Cauchy pour l’équation des ondes. Bull. Soc. Math. France 67, 153–170 (1939).
Wang, K. L. & Liu, S. Y. He’s fractional derivative and its application for fractional Fornberg–Whitham equation. Therm. Sci. 1, 54–54 (2016).
Miller, S. & Ross, B. An Introduction to the Fractional Calculus and Fractional Differential Equations (Wiley, 1993).
Caputo, M. & Fabrizio, M. A new definition of fractional differential without singular kernel. Prog. Fract. Differ. Appl. 1, 1–13 (2015).
Khalil, R., Horani, M. A., Yousef, A. & Sababheh, M. A new definition of fractional derivative. J. Comput. Appl. Math. 264, 65–70 (2014).
Peng, Y. Z. Exact solutions for some nonlinear partial differential equations. Phys. Lett. A 314, 401–408 (2013).
Acknowledgements
This research has been funded by the Scientific Research Deanship at the University of Ha’il-Saudi Arabia through project number RG-23029.
Author information
Authors and Affiliations
Contributions
Data curation, W.W.M., N.I., M.W.A. and R.S.; formal analysis, W.W.M., N.I., M.W.A. and R.S.; project administration, W.W.M.; software, W.W.M.; writing—original draft, W.W.M., N.I., M.W.A. and R.S.; writing—review and editing, W.W.M. and N.I. All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mohammed, W.W., Iqbal, N., Sidaoui, R. et al. The solitary solutions for the stochastic fractional Chen Lee Liu model perturbed by multiplicative noise in optical fibers and plasma physics. Sci Rep 14, 10516 (2024). https://doi.org/10.1038/s41598-024-60517-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1038/s41598-024-60517-5
Keywords
Comments
By submitting a comment you agree to abide by our Terms and Community Guidelines. If you find something abusive or that does not comply with our terms or guidelines please flag it as inappropriate.
